TM 1-1520-238-T-7
11–42
11–6.
CONTROLS AND INDICATORS (cont)
11–6
Table 11–1.
Flight Control System Controls and Indicators (cont)
M70-324
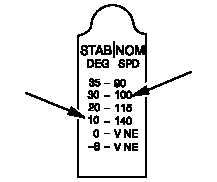
NOMINAL SPEED
INDICATOR
STABILATOR DEGREES
INDICATOR
STAB DEG/NOM SPD Placard Panel
SECTION II.
THEORY OF OPERATION
11–7.
SYSTEM DESCRIPTION
11–7
a. Flight Control System.
The flight control system (fig 11–14) transmits input commands to the main
rotor, tail rotor, and stabilator for flight control of the helicopter. Flight control of the helicopter encompasses
longitudinal (forward and back), lateral (sideways), collective (up and down), and directional (heading) controls.
These controls center around the pitch, roll, and yaw axis (pitch axis has two inputs: cyclic stick longitudinal
control, and stabilator pitch movements). All control movements, except stabilator, are assisted by hydraulic
servocylinders. The stabilator has two tandem (back to back) electrically actuated servo motors.
(1) Two helicopter flight control sources are provided: mechanical flight controls (for example: control rods
and bellcranks) and BUCS (fly-by-wire). SPADs are used to disconnect mechanical flight control linkage and
reestablish flight control via BUCS activation. When mechanical flight controls jam, a pull force of approximately
25 to 50 lbs. severs the shear pin and decouples the jammed mechanical flight control. The LVDT(s) then sends
electrical control stick displacement signals to the DASEC to control BUCS actuation and response. Mechanical
flight control consists of eight SPADs: pilot and CPG longitudinal, lateral, collective, and directional. Cyclic sticks,
directional pedals, and collective sticks are linked together via SPAD coupled mechanical linkage.
(2) Cyclic sticks input longitudinal and lateral demands to the main rotor assembly. Collective sticks input
vertical demands to the main rotor assembly to increase lift and equally change pitch to the four rotor blades.
Directional pedals input anti-torque and directional commands to the tail rotor assembly.
b. Force Trim System.
(1) Purpose.
The purpose of the force trim system is to provide directional, longitudinal and lateral flight
trim.