TM 1-1520-238-10
Change 3
3-35
Over mountainous terrain, doppler data is better than over
grass or water, but not as good as over flat terrain. The
HARS will reject doppler velocities as long as the memory
or malfunction condition exists. In addition, if the free iner-
tial condition exists too long, the HARS inertial velocities
will drift enough so that when the doppler data again be-
comes valid, the HARS will continue to reject the doppler
velocities because they are no longer within the capture
window of the Kalman filter. If this occurs, the available
corrective actions are limited. The pilot can slow the heli-
copter to less than 40 KTAS in an attempt to let the HARS
Kalman filter recapture the doppler velocities. If this fails,
the only remaining corrective options are either to land the
helicopter and when stationary place the HARS control
switch in NORM to cage the HARS inertial velocities to
zero, or to attempt an inflight alignment (restart) of the
HARS. There is always the option to continue flight in the
free inertial condition, realizing that everything that uses
the HARS data (HAS, flight symbology, navigation, and
fire control) will be degraded to the extent that the HARS
has drifted and will continue to drift.
The HARS computes error estimates and accelerometer
biases during flight. This data is stored by the HARS as
mission data memory on shutdown. The mission data
memory allows the HARS to maintain a running calibra-
tion of its internal instruments. If, however, the HARS has
experienced more than 12 minutes total of free inertial
since it was turned on it will not update the mission data
memory on shutdown. The mission data memory can be
most easily corrupted by moving the helicopter during
alignment and not realigning before flight. Extended free
inertial and corrupt mission data memory are the two pri-
mary causes for inaccurate navigation in the non inte-
grated system.
HARS accomplishes internal bit and temperature stabi-
lization (for approximately 90 seconds) prior to initiating
alignment. The status of the HARS is continuously moni-
tored by the FD/LS; the on–command FD/LS test (test 05
HARS) will fault isolate.
The HARS receives 28 vdc from the No. 3 essential dc
bus through the HARS DC circuit breaker and 115 vac
from the No. 1 essential ac bus through the HARS AC cir-
cuit breaker; both circuit breakers are on the pilot over-
head circuit breaker panel.
b. Controls and Functions. Control of the HARS is
provided by the HARS mode selector switch. Control and
indicator functions of the HARS mode selector switch are
described in table 3-11.
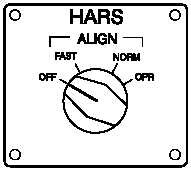
The HARS control panel (fig 3-10) is located on the pilot
lower right instrument panel. The control panel has a
mode selector switch with four positions: OFF, OPR and
two ALIGN positions: FAST and NORM. Signals are sent
to the MUX and doppler for use by the fire control comput-
er and other systems such as DASE, navigation, stabila-
tor, and symbology. The VDU (fig 4-2) and the HDU (fig
4-9) display this information to the pilot.
M01-120
Figure 3-10.
HARS Control Panel
NOTE
Loss of the heading tape during HARS
alignment indicates a fault occurred with
the HARS during alignment. Check the
FD/LS.
If any helicopter movement occurs
(heading or position) with the HARS
switch in either of the ALIGN positions,
the HARS shall be turned off and re-
aligned without moving the helicopter.
Whenever the helicopter is on the
ground and will not be moved for longer
than one minute, set the HARS switch to
NORM. This will prevent the HARS iner-
tial velocities from drifting. The HARS
switch shall be set to OPR prior to mov-
ing the helicopter.